
400-class Drone
Over my undergrad and my time in Singapore, I built drones in four different sizes. Pictured above is the 400-class drone (that is, the distance between the centers of opposite motors is about 400mm).
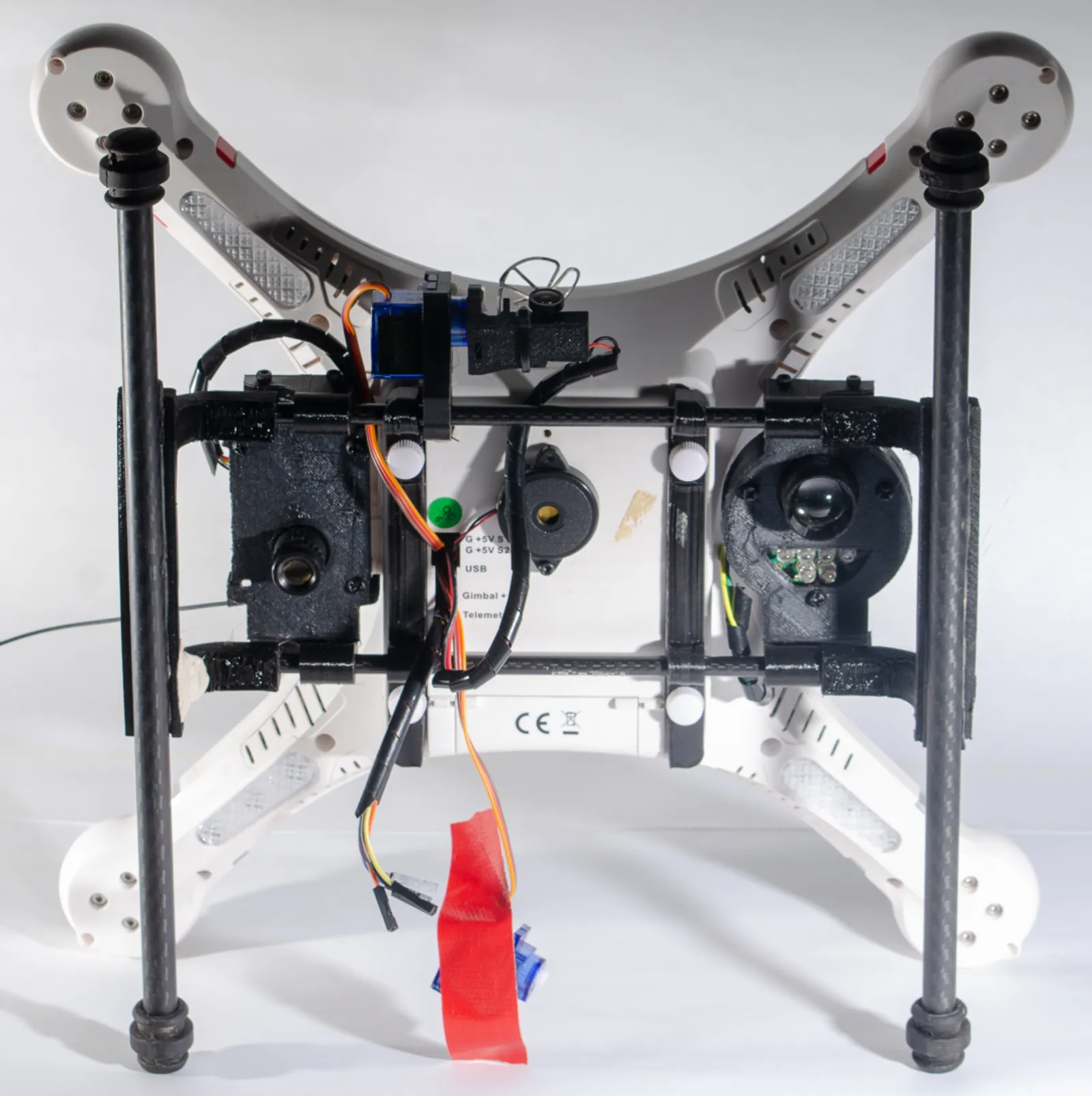
This is a modified Quanum Nova Pro: the internal electronics and landing gear were replaced. This drone uses 9” propellers, and supports a parachute-dropped cargo bay (that was not finished). It can fly for up to 20 minutes without a payload, and can maintain position to within a few centimeters in all axes.
On the underside of the drone, you can see the stabilization camera (left), forward camera that can tilt downwards (top center), and a laser rangefinder for altitude control (right). The motor with red tape attached to it is intended for the cargo bay.
250-class Racing Drone
This drone uses four motors in a pusher configuration. It can achieve speeds of up to 80 km/h (~50 mph) in level flight. The camera is mounted in a fixed position in the front.
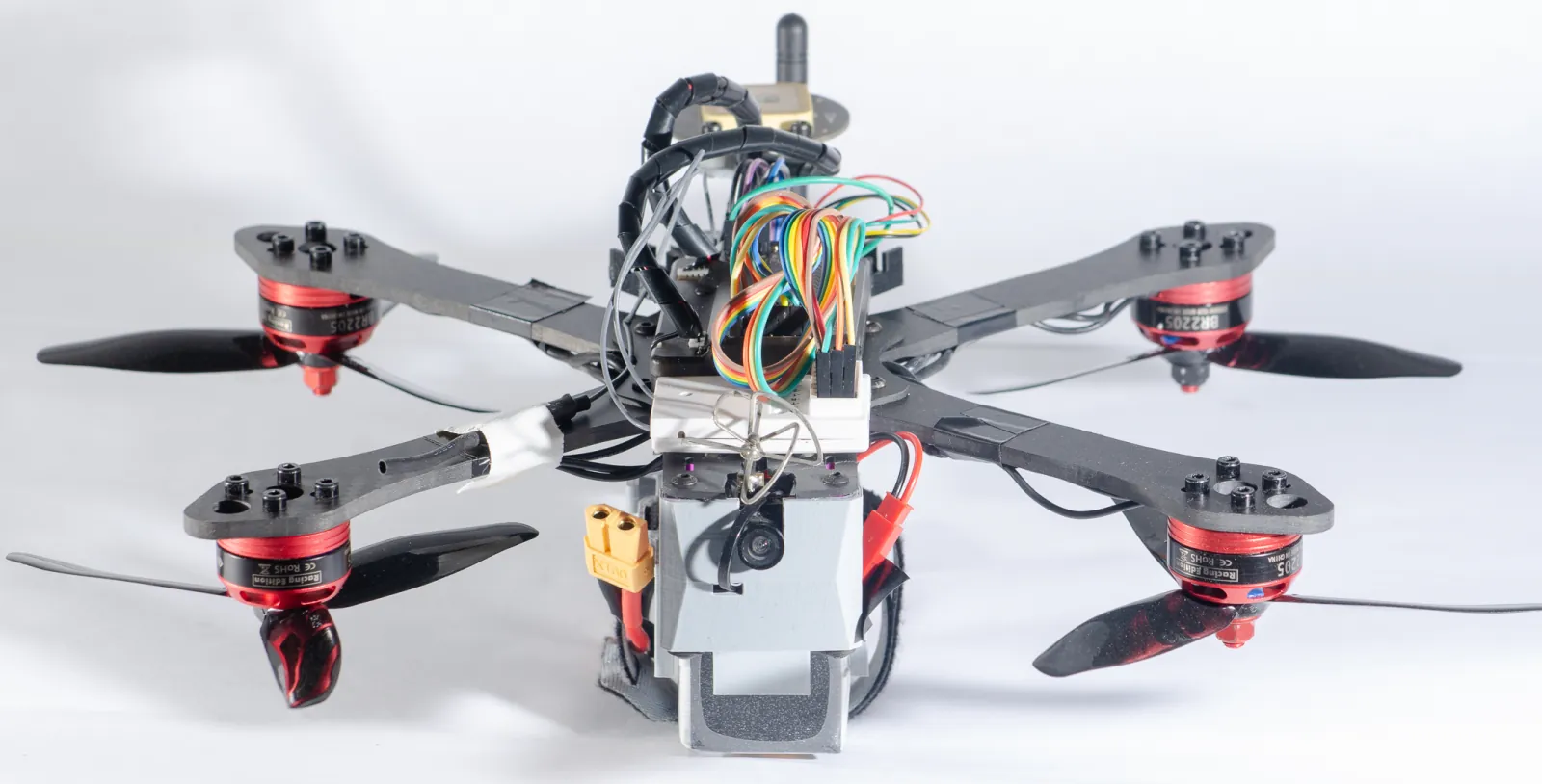
Unlike most racing drones, this uses an ArduPilot controller and supports GPS navigation and waypoint-based navigation. I’ve only flown this a few times before winter struck and I could no longer fly.

1010-class Heavy Lift Drone and 90-class Micro Brushed
This drone is huge – the propellers are 16” across each. It was designed and built from parts over 2016-2017, and proved to be unwieldy for flying in Singapore. It was later dismantled to provide parts for the other two.
I also bought a micro-drone kit for pleasure flying. It can’t carry any significant payload or reach a good speed, so I lost interest in it.
